
1. Introduction
ARCore est une plate-forme qui permet de créer des applications de réalité augmentée (RA) sur des appareils mobiles. L'API ARCore Depth de Google permet d'accéder à une représentation de profondeur pour chaque frame d'une session ARCore. Chaque pixel de l'image de profondeur fournit une mesure de la distance entre l'appareil photo et l'environnement.
L'API Raw Depth fournit des images de profondeur qui ne sont pas filtrées dans l'espace écran pour lisser et interpoler les résultats. Ces valeurs sont plus précises d'un point de vue géométrique, mais peuvent contenir des données manquantes et être moins alignées sur l'image de la caméra associée.
Cet atelier de programmation vous explique comment utiliser l'API Raw Depth pour effectuer une analyse de la géométrie 3D de la scène. Vous allez créer une application de RA simple qui utilise des données de profondeur brutes pour détecter et visualiser la géométrie du monde.
Les API Depth et Raw Depth ne fonctionnent qu'avec certains appareils compatibles ARCore. L'API Depth n'est disponible que sur Android.
Ce que vous allez faire
Dans cet atelier de programmation, vous allez créer une application qui utilise des images de profondeur brutes pour chaque frame afin d'effectuer une analyse géométrique du monde qui vous entoure. Cette application :
- Vérifiez si l'appareil cible est compatible avec Depth.
- Récupérez l'image de profondeur brute pour chaque frame de caméra.
- Reprojectez les images de profondeur brutes en points 3D et filtrez ces points en fonction de la confiance et de la géométrie.
- Utilisez le nuage de points de profondeur brute pour segmenter les objets 3D qui vous intéressent.
|
Aperçu de ce que vous allez créer. |

Remarque : Si vous rencontrez des problèmes, consultez la dernière section pour obtenir des conseils de dépannage.
2. Prérequis
Vous aurez besoin de matériel et de logiciels spécifiques pour cet atelier de programmation.
Matériel requis
- Un appareil compatible ARCore connecté à l'ordinateur de développement via un câble USB, sur lequel le débogage USB est activé. Cet appareil doit aussi être compatible avec l'API Depth.
Logiciels requis
- SDK ARCore 1.31.0 ou version ultérieure.
- Un ordinateur de développement sur lequel est installé Android Studio (version 4.0.1 ou ultérieure).
3. Configurer
Configurer l'ordinateur de développement
Connectez votre appareil ARCore à votre ordinateur avec le câble USB. Assurez-vous que votre appareil autorise le débogage USB. Ouvrez un terminal et exécutez adb devices, comme illustré ci-dessous :
adb devices List of devices attached <DEVICE_SERIAL_NUMBER> device
Le numéro de série <DEVICE_SERIAL_NUMBER> sera une chaîne propre à votre appareil. Assurez-vous qu'un seul appareil s'affiche avant de passer à la suite.
Télécharger et installer le code
Vous pouvez cloner le dépôt :
git clone https://github.com/googlecodelabs/arcore-rawdepthapi
Il est également possible de télécharger un fichier ZIP et de l'extraire :
Pour commencer à utiliser le code, procédez comme suit.
- Lancez Android Studio, puis sélectionnez Open an existing Android Studio project (Ouvrir un projet Android Studio existant).
- Accédez au répertoire local dans lequel vous avez stocké le fichier ZIP de profondeur brute.
- Double-cliquez sur le répertoire
arcore_rawdepthapi_codelab.
Le répertoire arcore_rawdepthapi_codelab est un projet Gradle unique comportant plusieurs modules. Si le volet "Project" (Projet) n'est pas déjà affiché en haut à gauche d'Android Studio, cliquez sur Projects (Projets) dans le menu déroulant pour l'afficher.
Vous devriez obtenir le résultat suivant :
| Ce projet contient les modules suivants :
|
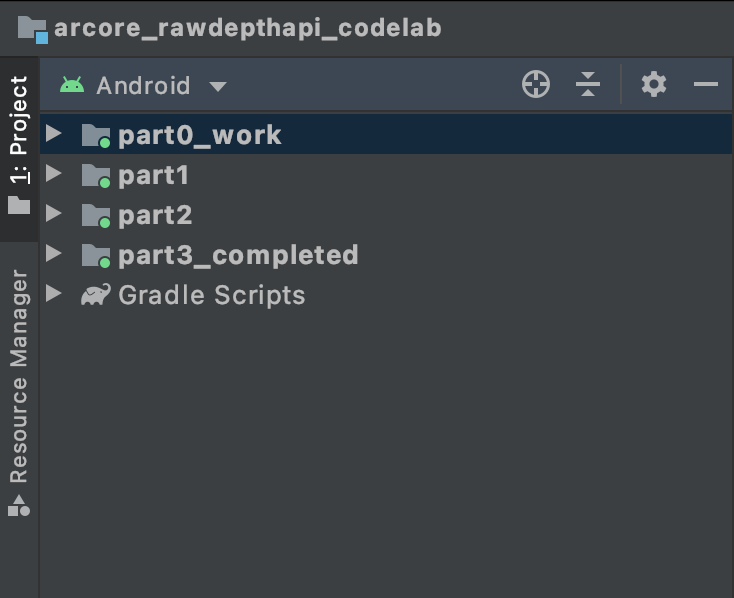
Vous allez travailler dans le module part0_work. Il existe également des solutions complètes pour chaque partie de l'atelier de programmation. Chaque module correspond à une application pouvant être créée.
4. Exécuter l'application de démarrage
Suivez ces étapes pour exécuter l'application de démarrage Raw Depth.
- Accédez à Run > Run… (Exécuter > Exécuter…). > 'part0_work'.
- Dans la boîte de dialogue Select Deployment Target (Sélectionner une cible de déploiement), sélectionnez votre appareil dans la liste Connected Devices (Appareils connectés), puis cliquez sur OK.
Android Studio génère l'application de départ, puis l'exécute sur votre appareil.
| Lorsque vous exécutez l'application pour la première fois, vous devez l'autoriser à utiliser l'appareil photo. Appuyez sur Allow (Autoriser) pour continuer. |
| Actuellement, l'application ne fait rien.Il s'agit de l'application de RA la plus élémentaire, qui affiche une vue de caméra de votre scène, mais ne fait rien d'autre.Le code existant est semblable à l'exemple Hello AR publié avec le SDK ARCore. |
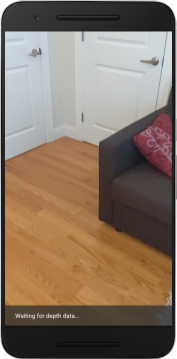
Vous allez ensuite utiliser l'API Raw Depth pour récupérer la géométrie de la scène qui vous entoure.
5. Configurer l'API Raw Depth (1re partie)
Assurez-vous que l'appareil cible est compatible avec la profondeur.
L'API Depth n'est pas compatible avec tous les appareils compatibles ARCore. Avant d'ajouter des fonctionnalités à votre application dans la fonction onResume() de RawDepthCodelabActivity.java, où une session est créée, assurez-vous que l'appareil cible est compatible avec la profondeur.
Recherchez le code existant :
// Create the ARCore session.
session = new Session(/* context= */ this);
Mettez-le à jour pour vous assurer que l'application ne s'exécute que sur les appareils compatibles avec l'API Depth.
// Create the ARCore session.
session = new Session(/* context= */ this);
if (!session.isDepthModeSupported(Config.DepthMode.RAW_DEPTH_ONLY)) {
message =
"This device does not support the ARCore Raw Depth API. See" +
"https://developers.google.com/ar/devices for
a list of devices that do.";
}
Activer la profondeur brute
L'API Raw Depth fournit une image de profondeur non lissée et une image de confiance correspondante contenant la confiance de profondeur pour chaque pixel de l'image de profondeur brute. Activez la profondeur brute en mettant à jour le code suivant sous l'instruction try-catch que vous venez de modifier.
try {
// ************ New code to add ***************
// Enable raw depth estimation and auto focus mode while ARCore is running.
Config config = session.getConfig();
config.setDepthMode(Config.DepthMode.RAW_DEPTH_ONLY);
config.setFocusMode(Config.FocusMode.AUTO);
session.configure(config);
// ************ End new code to add ***************
session.resume();
} catch (CameraNotAvailableException e) {
messageSnackbarHelper.showError(this, "Camera not available. Try restarting the app.");
session = null;
return;
}
À présent, la session de RA est configurée correctement et l'application peut utiliser des fonctionnalités basées sur la profondeur.
Appeler l'API Depth
Appelez ensuite l'API Depth pour récupérer les représentations de profondeur pour chaque image. Encapsulez les données de profondeur dans une nouvelle classe en créant un fichier. Effectuez un clic droit sur le dossier rawdepth et sélectionnez New > Java Class. Cela crée un fichier vide. Ajoutez les éléments suivants à cette classe :
src/main/java/com/google/ar/core/codelab/rawdepth/DepthData.java
package com.google.ar.core.codelab.rawdepth;
import android.media.Image;
import android.opengl.Matrix;
import com.google.ar.core.Anchor;
import com.google.ar.core.CameraIntrinsics;
import com.google.ar.core.Frame;
import com.google.ar.core.exceptions.NotYetAvailableException;
import java.nio.ByteBuffer;
import java.nio.ByteOrder;
import java.nio.FloatBuffer;
import java.nio.ShortBuffer;
/**
* Convert depth data from ARCore depth images to 3D pointclouds. Points are added by calling the
* Raw Depth API, and reprojected into 3D space.
*/
public class DepthData {
public static final int FLOATS_PER_POINT = 4; // X,Y,Z,confidence.
}
Cette classe permet de convertir des images de profondeur en nuages de points. Les nuages de points représentent la géométrie de la scène avec une liste de points ayant chacun une coordonnée 3D (x, y, z) et une valeur de confiance comprise entre 0 et 1.
Ajoutez des appels pour renseigner ces valeurs à l'aide de l'API Raw Depth en ajoutant une méthode create() en bas de la classe. Cette méthode interroge les dernières images de profondeur et de confiance, et stocke la nuage de points résultant. Les images de profondeur et de confiance contiendront des données correspondantes.
public static FloatBuffer create(Frame frame, Anchor cameraPoseAnchor) {
try {
Image depthImage = frame.acquireRawDepthImage16Bits();
Image confidenceImage = frame.acquireRawDepthConfidenceImage();
// Retrieve the intrinsic camera parameters corresponding to the depth image to
// transform 2D depth pixels into 3D points. See more information about the depth values
// at
// https://developers.google.com/ar/develop/java/depth/overview#understand-depth-values.
final CameraIntrinsics intrinsics = frame.getCamera().getTextureIntrinsics();
float[] modelMatrix = new float[16];
cameraPoseAnchor.getPose().toMatrix(modelMatrix, 0);
final FloatBuffer points = convertRawDepthImagesTo3dPointBuffer(
depthImage, confidenceImage, intrinsics, modelMatrix);
depthImage.close();
confidenceImage.close();
return points;
} catch (NotYetAvailableException e) {
// This normally means that depth data is not available yet.
// This is normal, so you don't have to spam the logcat with this.
}
return null;
}
|
|
|
|
|
|
|
|



Le code stocke également l'ancrage de la caméra à ce moment-là, de sorte que les informations de profondeur peuvent être transformées en coordonnées mondiales en appelant une méthode d'assistance convertRawDepthImagesTo3dPointBuffer(). Cette méthode d'assistance prend chaque pixel de l'image de profondeur et utilise les intrinsèques de la caméra pour déprojeter la profondeur en un point 3D par rapport à la caméra. L'ancrage de la caméra est ensuite utilisé pour convertir la position du point en coordonnées mondiales. Chaque pixel existant est converti en point 3D (en mètres) et stocké avec son niveau de confiance.
Ajoutez la méthode d'assistance suivante à DepthData.java :
/** Apply camera intrinsics to convert depth image into a 3D pointcloud. */
private static FloatBuffer convertRawDepthImagesTo3dPointBuffer(
Image depth, Image confidence, CameraIntrinsics cameraTextureIntrinsics, float[] modelMatrix) {
// Java uses big endian so change the endianness to ensure
// that the depth data is in the correct byte order.
final Image.Plane depthImagePlane = depth.getPlanes()[0];
ByteBuffer depthByteBufferOriginal = depthImagePlane.getBuffer();
ByteBuffer depthByteBuffer = ByteBuffer.allocate(depthByteBufferOriginal.capacity());
depthByteBuffer.order(ByteOrder.LITTLE_ENDIAN);
while (depthByteBufferOriginal.hasRemaining()) {
depthByteBuffer.put(depthByteBufferOriginal.get());
}
depthByteBuffer.rewind();
ShortBuffer depthBuffer = depthByteBuffer.asShortBuffer();
final Image.Plane confidenceImagePlane = confidence.getPlanes()[0];
ByteBuffer confidenceBufferOriginal = confidenceImagePlane.getBuffer();
ByteBuffer confidenceBuffer = ByteBuffer.allocate(confidenceBufferOriginal.capacity());
confidenceBuffer.order(ByteOrder.LITTLE_ENDIAN);
while (confidenceBufferOriginal.hasRemaining()) {
confidenceBuffer.put(confidenceBufferOriginal.get());
}
confidenceBuffer.rewind();
// To transform 2D depth pixels into 3D points, retrieve the intrinsic camera parameters
// corresponding to the depth image. See more information about the depth values at
// https://developers.google.com/ar/develop/java/depth/overview#understand-depth-values.
final int[] intrinsicsDimensions = cameraTextureIntrinsics.getImageDimensions();
final int depthWidth = depth.getWidth();
final int depthHeight = depth.getHeight();
final float fx =
cameraTextureIntrinsics.getFocalLength()[0] * depthWidth / intrinsicsDimensions[0];
final float fy =
cameraTextureIntrinsics.getFocalLength()[1] * depthHeight / intrinsicsDimensions[1];
final float cx =
cameraTextureIntrinsics.getPrincipalPoint()[0] * depthWidth / intrinsicsDimensions[0];
final float cy =
cameraTextureIntrinsics.getPrincipalPoint()[1] * depthHeight / intrinsicsDimensions[1];
// Allocate the destination point buffer. If the number of depth pixels is larger than
// `maxNumberOfPointsToRender` we uniformly subsample. The raw depth image may have
// different resolutions on different devices.
final float maxNumberOfPointsToRender = 20000;
int step = (int) Math.ceil(Math.sqrt(depthWidth * depthHeight / maxNumberOfPointsToRender));
FloatBuffer points = FloatBuffer.allocate(depthWidth / step * depthHeight / step * FLOATS_PER_POINT);
float[] pointCamera = new float[4];
float[] pointWorld = new float[4];
for (int y = 0; y < depthHeight; y += step) {
for (int x = 0; x < depthWidth; x += step) {
// Depth images are tightly packed, so it's OK to not use row and pixel strides.
int depthMillimeters = depthBuffer.get(y * depthWidth + x); // Depth image pixels are in mm.
if (depthMillimeters == 0) {
// Pixels with value zero are invalid, meaning depth estimates are missing from
// this location.
continue;
}
final float depthMeters = depthMillimeters / 1000.0f; // Depth image pixels are in mm.
// Retrieve the confidence value for this pixel.
final byte confidencePixelValue =
confidenceBuffer.get(
y * confidenceImagePlane.getRowStride()
+ x * confidenceImagePlane.getPixelStride());
final float confidenceNormalized = ((float) (confidencePixelValue & 0xff)) / 255.0f;
// Unproject the depth into a 3D point in camera coordinates.
pointCamera[0] = depthMeters * (x - cx) / fx;
pointCamera[1] = depthMeters * (cy - y) / fy;
pointCamera[2] = -depthMeters;
pointCamera[3] = 1;
// Apply model matrix to transform point into world coordinates.
Matrix.multiplyMV(pointWorld, 0, modelMatrix, 0, pointCamera, 0);
points.put(pointWorld[0]); // X.
points.put(pointWorld[1]); // Y.
points.put(pointWorld[2]); // Z.
points.put(confidenceNormalized);
}
}
points.rewind();
return points;
}
Obtenir les dernières données de profondeur brute pour chaque frame
Modifiez l'application pour récupérer les informations de profondeur et les aligner sur les coordonnées mondiales pour chaque pose.
Dans RawDepthCodelabActivity.java, dans la méthode onDrawFrame(), recherchez les lignes existantes :
Frame frame = session.update();
Camera camera = frame.getCamera();
// If the frame is ready, render the camera preview image to the GL surface.
backgroundRenderer.draw(frame);
Ajoutez les lignes suivantes juste en dessous :
// Retrieve the depth data for this frame.
FloatBuffer points = DepthData.create(frame, session.createAnchor(camera.getPose()));
if (points == null) {
return;
}
if (messageSnackbarHelper.isShowing() && points != null) {
messageSnackbarHelper.hide(this);
}
6. Effectuer le rendu des données de profondeur (2e partie)
Maintenant que vous disposez d'un nuage de points de profondeur, il est temps de voir à quoi ressemblent les données affichées à l'écran.
Ajouter un moteur de rendu pour visualiser les points de profondeur
Ajoutez un moteur de rendu pour visualiser les points de profondeur.
Commencez par ajouter une classe pour contenir la logique de rendu. Cette classe effectue les opérations OpenGL pour initialiser les nuanceurs afin de visualiser le nuage de points de profondeur.
| Ajouter la classe DepthRenderer
|
Remplissez cette classe avec le code suivant :
src/main/java/com/google/ar/core/codelab/common/rendering/DepthRenderer.java
package com.google.ar.core.codelab.common.rendering;
import android.content.Context;
import android.opengl.GLES20;
import android.opengl.Matrix;
import com.google.ar.core.Camera;
import com.google.ar.core.codelab.rawdepth.DepthData;
import java.io.IOException;
import java.nio.FloatBuffer;
public class DepthRenderer {
private static final String TAG = DepthRenderer.class.getSimpleName();
// Shader names.
private static final String VERTEX_SHADER_NAME = "shaders/depth_point_cloud.vert";
private static final String FRAGMENT_SHADER_NAME = "shaders/depth_point_cloud.frag";
public static final int BYTES_PER_FLOAT = Float.SIZE / 8;
private static final int BYTES_PER_POINT = BYTES_PER_FLOAT * DepthData.FLOATS_PER_POINT;
private static final int INITIAL_BUFFER_POINTS = 1000;
private int arrayBuffer;
private int arrayBufferSize;
private int programName;
private int positionAttribute;
private int modelViewProjectionUniform;
private int pointSizeUniform;
private int numPoints = 0;
public DepthRenderer() {}
public void createOnGlThread(Context context) throws IOException {
ShaderUtil.checkGLError(TAG, "Bind");
int[] buffers = new int[1];
GLES20.glGenBuffers(1, buffers, 0);
arrayBuffer = buffers[0];
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, arrayBuffer);
arrayBufferSize = INITIAL_BUFFER_POINTS * BYTES_PER_POINT;
GLES20.glBufferData(GLES20.GL_ARRAY_BUFFER, arrayBufferSize, null, GLES20.GL_DYNAMIC_DRAW);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0);
ShaderUtil.checkGLError(TAG, "Create");
int vertexShader =
ShaderUtil.loadGLShader(TAG, context, GLES20.GL_VERTEX_SHADER, VERTEX_SHADER_NAME);
int fragmentShader =
ShaderUtil.loadGLShader(TAG, context, GLES20.GL_FRAGMENT_SHADER, FRAGMENT_SHADER_NAME);
programName = GLES20.glCreateProgram();
GLES20.glAttachShader(programName, vertexShader);
GLES20.glAttachShader(programName, fragmentShader);
GLES20.glLinkProgram(programName);
GLES20.glUseProgram(programName);
ShaderUtil.checkGLError(TAG, "Program");
positionAttribute = GLES20.glGetAttribLocation(programName, "a_Position");
modelViewProjectionUniform = GLES20.glGetUniformLocation(programName, "u_ModelViewProjection");
// Sets the point size, in pixels.
pointSizeUniform = GLES20.glGetUniformLocation(programName, "u_PointSize");
ShaderUtil.checkGLError(TAG, "Init complete");
}
}
Afficher les données de profondeur
Ensuite, fournissez la source des nuanceurs de rendu. Ajoutez la méthode update() suivante au bas de la classe DepthRenderer. Cette méthode prend les dernières informations de profondeur en entrée et copie les données du nuage de points sur le GPU.
/**
* Update the OpenGL buffer contents to the provided point. Repeated calls with the same point
* cloud will be ignored.
*/
public void update(FloatBuffer points) {
ShaderUtil.checkGLError(TAG, "Update");
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, arrayBuffer);
// If the array buffer is not large enough to fit the new point cloud, resize it.
points.rewind();
numPoints = points.remaining() / DepthData.FLOATS_PER_POINT;
if (numPoints * BYTES_PER_POINT > arrayBufferSize) {
while (numPoints * BYTES_PER_POINT > arrayBufferSize) {
arrayBufferSize *= 2;
}
GLES20.glBufferData(GLES20.GL_ARRAY_BUFFER, arrayBufferSize, null, GLES20.GL_DYNAMIC_DRAW);
}
GLES20.glBufferSubData(
GLES20.GL_ARRAY_BUFFER, 0, numPoints * BYTES_PER_POINT, points);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0);
ShaderUtil.checkGLError(TAG, "Update complete");
}
Dessinez les dernières données à l'écran en ajoutant une méthode draw() au bas de la classe DepthRenderer. Cette méthode prend les informations du nuage de points 3D et les projette sur la vue de la caméra afin qu'elles puissent être affichées à l'écran.
/** Render the point cloud. The ARCore point cloud is given in world space. */
public void draw(Camera camera) {
float[] projectionMatrix = new float[16];
camera.getProjectionMatrix(projectionMatrix, 0, 0.1f, 100.0f);
float[] viewMatrix = new float[16];
camera.getViewMatrix(viewMatrix, 0);
float[] viewProjection = new float[16];
Matrix.multiplyMM(viewProjection, 0, projectionMatrix, 0, viewMatrix, 0);
ShaderUtil.checkGLError(TAG, "Draw");
GLES20.glUseProgram(programName);
GLES20.glEnableVertexAttribArray(positionAttribute);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, arrayBuffer);
GLES20.glVertexAttribPointer(positionAttribute, 4, GLES20.GL_FLOAT, false, BYTES_PER_POINT, 0);
GLES20.glUniformMatrix4fv(modelViewProjectionUniform, 1, false, viewProjection, 0);
// Set point size to 5 pixels.
GLES20.glUniform1f(pointSizeUniform, 5.0f);
GLES20.glDrawArrays(GLES20.GL_POINTS, 0, numPoints);
GLES20.glDisableVertexAttribArray(positionAttribute);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0);
ShaderUtil.checkGLError(TAG, "Draw complete");
}
Vous pouvez définir la taille des points en pixels à l'aide de la variable pointSizeUniform. pointSizeUniform est défini sur 5 pixels dans l'exemple d'application.
Ajouter des nuanceurs
Il existe de nombreuses façons d'afficher la profondeur et les données de profondeur dans votre application. Ici, vous allez ajouter quelques nuanceurs et créer une simple visualisation de cartographie des couleurs.
Ajoutez les nuanceurs .vert et .frag dans le répertoire src/main/assets/shaders/.
| Ajouter un nouveau nuanceur ".vert"Dans Android Studio :
|

Dans le nouveau fichier .vert, ajoutez le code suivant :
src/main/assets/shaders/depth_point_cloud.vert
uniform mat4 u_ModelViewProjection;
uniform float u_PointSize;
attribute vec4 a_Position;
varying vec4 v_Color;
// Return an interpolated color in a 6 degree polynomial interpolation.
vec3 GetPolynomialColor(in float x,
in vec4 kRedVec4, in vec4 kGreenVec4, in vec4 kBlueVec4,
in vec2 kRedVec2, in vec2 kGreenVec2, in vec2 kBlueVec2) {
// Moves the color space a little bit to avoid pure red.
// Removes this line for more contrast.
x = clamp(x * 0.9 + 0.03, 0.0, 1.0);
vec4 v4 = vec4(1.0, x, x * x, x * x * x);
vec2 v2 = v4.zw * v4.z;
return vec3(
dot(v4, kRedVec4) + dot(v2, kRedVec2),
dot(v4, kGreenVec4) + dot(v2, kGreenVec2),
dot(v4, kBlueVec4) + dot(v2, kBlueVec2)
);
}
// Return a smooth Percept colormap based upon the Turbo colormap.
vec3 PerceptColormap(in float x) {
const vec4 kRedVec4 = vec4(0.55305649, 3.00913185, -5.46192616, -11.11819092);
const vec4 kGreenVec4 = vec4(0.16207513, 0.17712472, 15.24091500, -36.50657960);
const vec4 kBlueVec4 = vec4(-0.05195877, 5.18000081, -30.94853351, 81.96403246);
const vec2 kRedVec2 = vec2(27.81927491, -14.87899417);
const vec2 kGreenVec2 = vec2(25.95549545, -5.02738237);
const vec2 kBlueVec2 = vec2(-86.53476570, 30.23299484);
const float kInvalidDepthThreshold = 0.01;
return step(kInvalidDepthThreshold, x) *
GetPolynomialColor(x, kRedVec4, kGreenVec4, kBlueVec4,
kRedVec2, kGreenVec2, kBlueVec2);
}
void main() {
// Color the pointcloud by height.
float kMinHeightMeters = -2.0f;
float kMaxHeightMeters = 2.0f;
float normalizedHeight = clamp((a_Position.y - kMinHeightMeters) / (kMaxHeightMeters - kMinHeightMeters), 0.0, 1.0);
v_Color = vec4(PerceptColormap(normalizedHeight), 1.0);
gl_Position = u_ModelViewProjection * vec4(a_Position.xyz, 1.0);
gl_PointSize = u_PointSize;
}
Ce nuanceur utilise la carte de couleurs Turbo pour une visualisation optimisée. Il effectue les étapes suivantes :
- Récupère l'altitude de chaque point (axe Y en coordonnées mondiales).
- Calcule une couleur associée à cette altitude (rouge=basse, bleu=haute).
- Calcule la position à l'écran de chaque point.
- Définit la taille (en pixels) de chaque point, comme défini dans la méthode
DepthRenderer.update().
Créez un nuanceur de fragment dans le même répertoire et nommez-le depth_point_cloud.frag en répétant les étapes de cette section.
Ajoutez ensuite le code suivant à ce nouveau fichier pour afficher chaque point sous la forme d'un seul sommet de couleur uniforme, comme défini dans le nuanceur de vertex.
src/main/assets/shaders/depth_point_cloud.frag
precision mediump float;
varying vec4 v_Color;
void main() {
gl_FragColor = v_Color;
}
Pour appliquer ce rendu, ajoutez des appels à la classe DepthRenderer dans votre RawDepthCodelabActivity.
src/main/java/com/google/ar/core/codelab/common/rendering/RawDepthCodelabActivity.java
import com.google.ar.core.codelab.common.rendering.DepthRenderer;
En haut de la classe, ajoutez un membre privé à côté de backgroundRenderer.
private final DepthRenderer depthRenderer = new DepthRenderer();
Le depthRenderer doit être initialisé dans RawDepthCodelabActivity.onSurfaceCreated(), comme le backgroundRenderer existant.
depthRenderer.createOnGlThread(/*context=*/ this);
Ajoutez le code suivant à la fin du bloc try-catch dans onDrawFrame pour afficher la profondeur la plus récente du frame actuel.
// Visualize depth points.
depthRenderer.update(points);
depthRenderer.draw(camera);
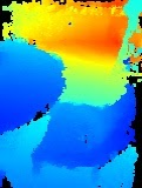
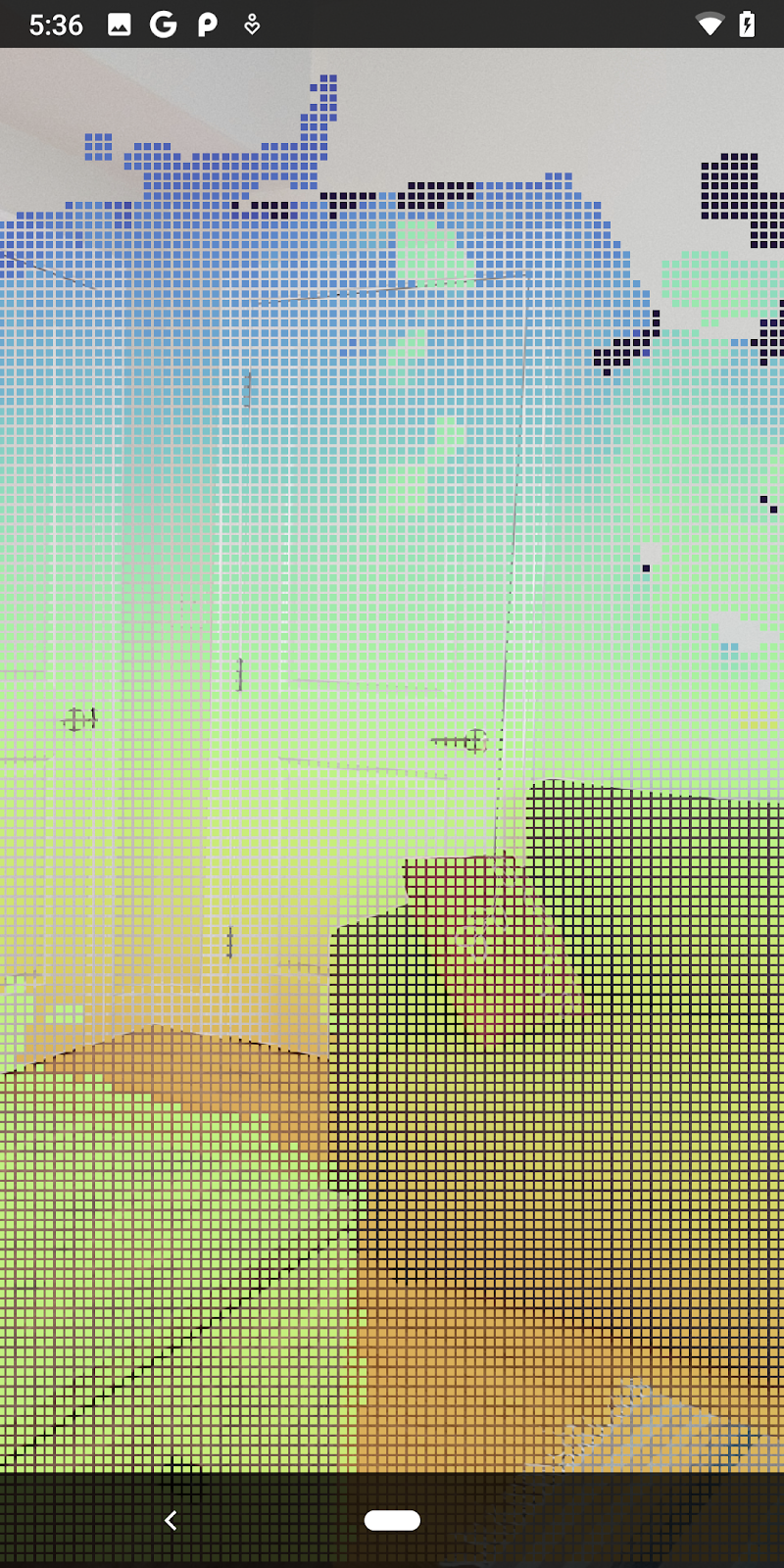
Avec ces modifications, l'application devrait maintenant se compiler correctement et afficher le nuage de points de profondeur.
| Exemple de visualisation brute du nuage de points de profondeur
|

7. Analyser les nuages de points 3D (partie 3)
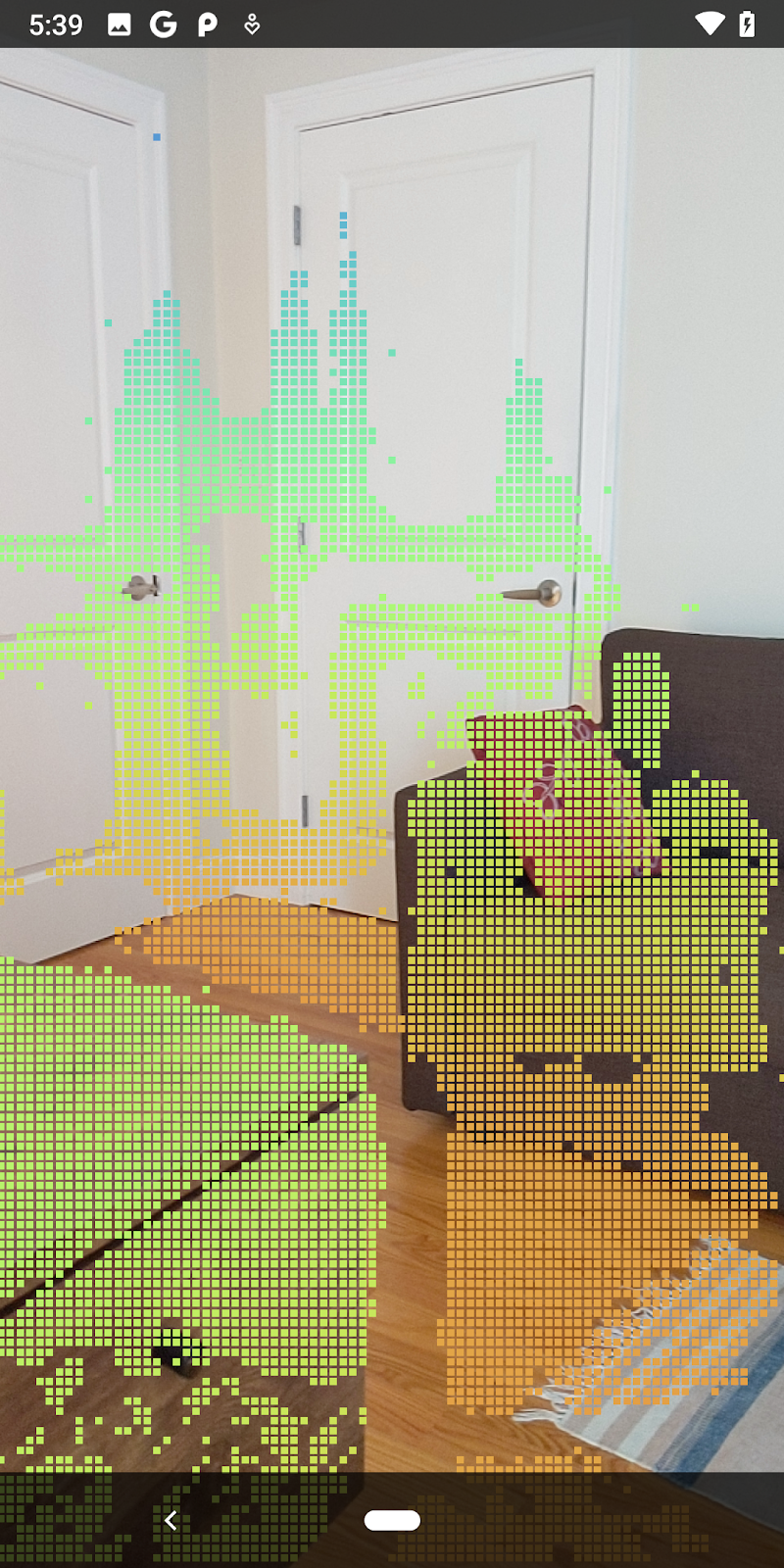
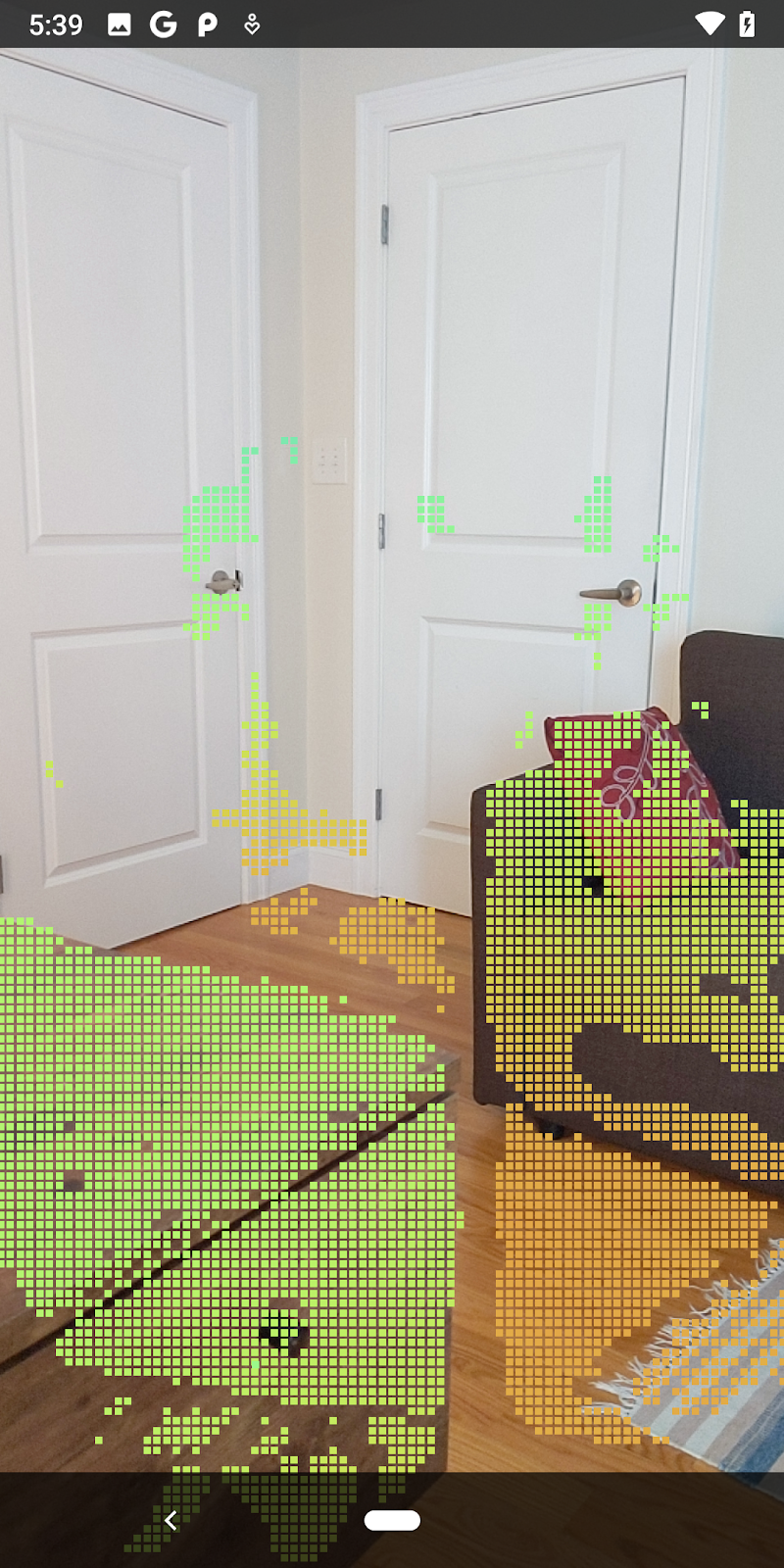
Vous pouvez analyser les données de profondeur une fois que vous avez vérifié qu'elles existent dans une session de RA. La valeur de confiance de chaque pixel est un outil important pour analyser la profondeur. Utilisez les valeurs de confiance pour analyser les nuages de points 3D.
Invalider les pixels à faible niveau de confiance
Vous avez récupéré la valeur de confiance pour chaque pixel de profondeur et l'avez enregistrée à côté de chaque point dans DepthData, mais vous ne l'avez pas encore utilisée.
Les valeurs de confidenceNormalized sont comprises entre 0 et 1, où 0 indique une faible confiance et 1 indique une confiance totale. Modifiez la méthode convertRawDepthImagesTo3dPointBuffer() dans la classe DepthData pour éviter d'enregistrer les pixels dont le niveau de confiance est trop faible pour être utile.
final float confidenceNormalized = ((float) (confidencePixelValue & 0xff)) / 255.0f;
// ******** New code to add ************
if (confidenceNormalized < 0.3) {
// Ignores "low-confidence" pixels.
continue;
}
// ******** End of new code to add *********
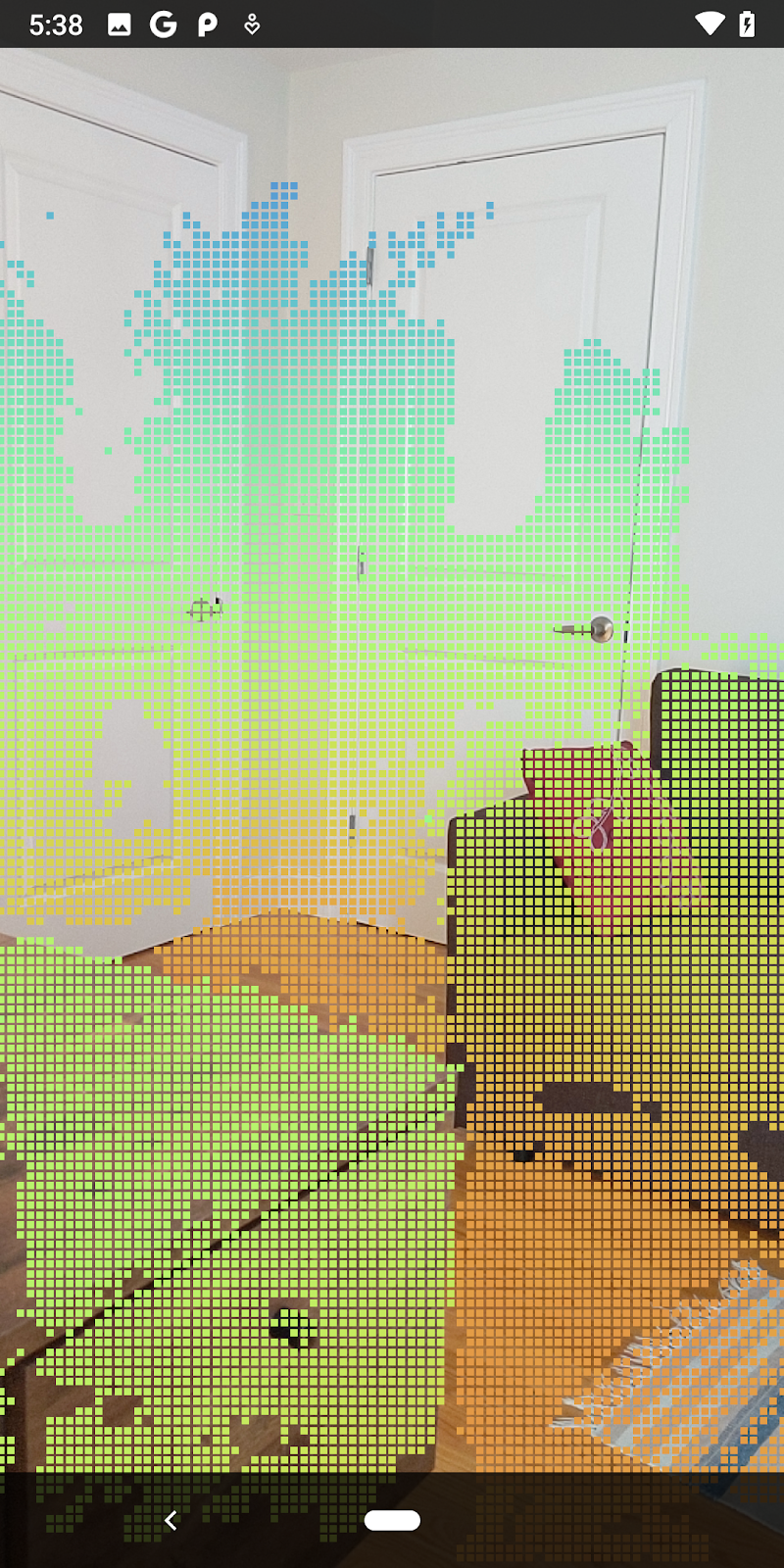
Essayez différents seuils pour le niveau de confiance afin de voir combien de points de profondeur sont conservés à chaque niveau.
|
|
|
|
|
Confiance >= 0,1 | Confiance >= 0,3 | Confiance >= 0,5 | Confiance >= 0,7 | Confiance >= 0,9 |

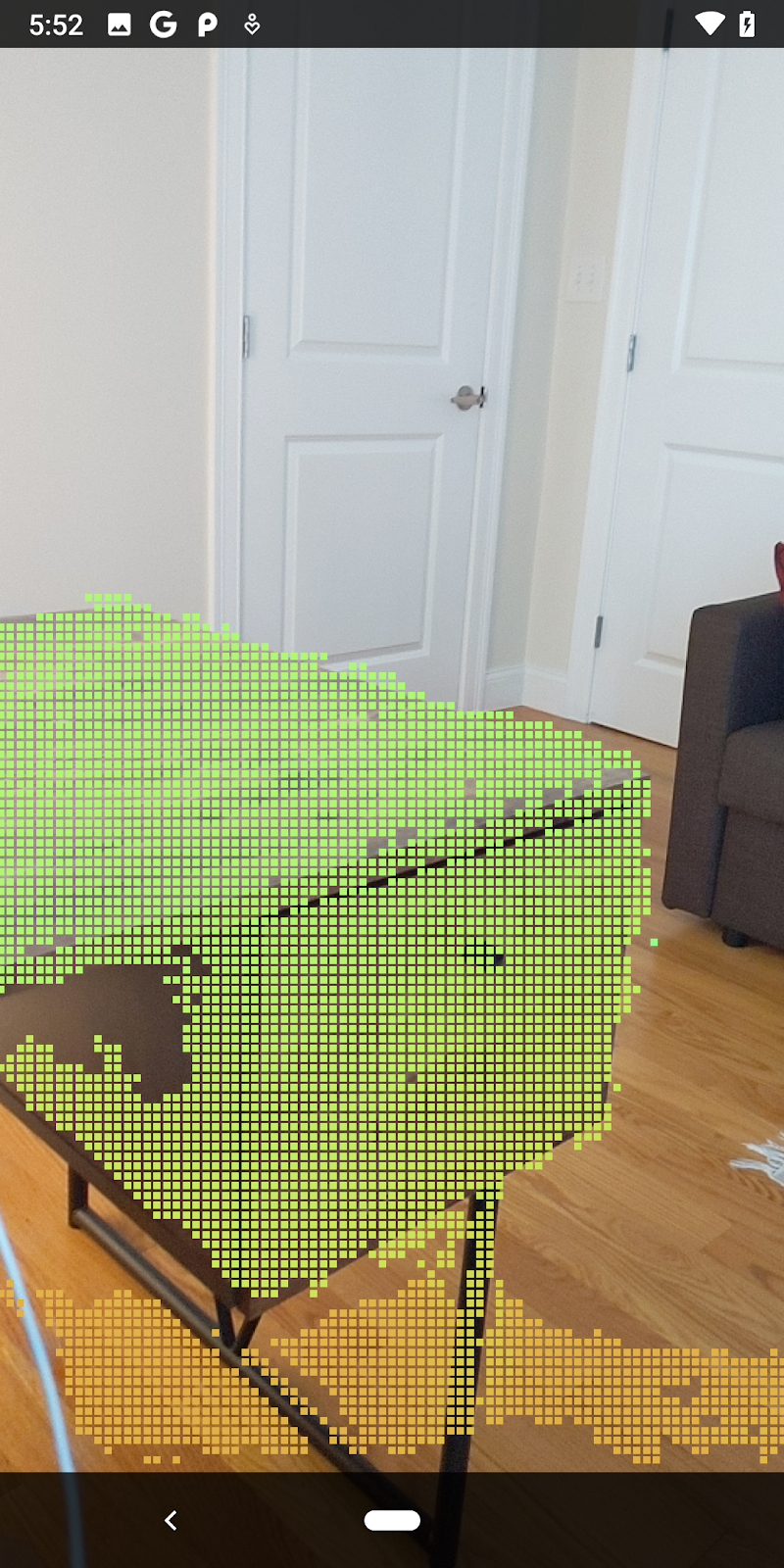
Filtrer les pixels par distance
Vous pouvez également filtrer les pixels de profondeur par distance. Les étapes suivantes concernent la géométrie proche de la caméra. Pour optimiser les performances, vous pouvez ignorer les points trop éloignés.
Modifiez le code de vérification de la confiance que vous venez d'ajouter en le remplaçant par le code suivant :
src/main/java/com/google/ar/core/codelab/rawdepth/DepthData.java
if (confidenceNormalized < 0.3 || depthMeters > 1.5) {
// Ignore "low-confidence" pixels or depth that is too far away.
continue;
}
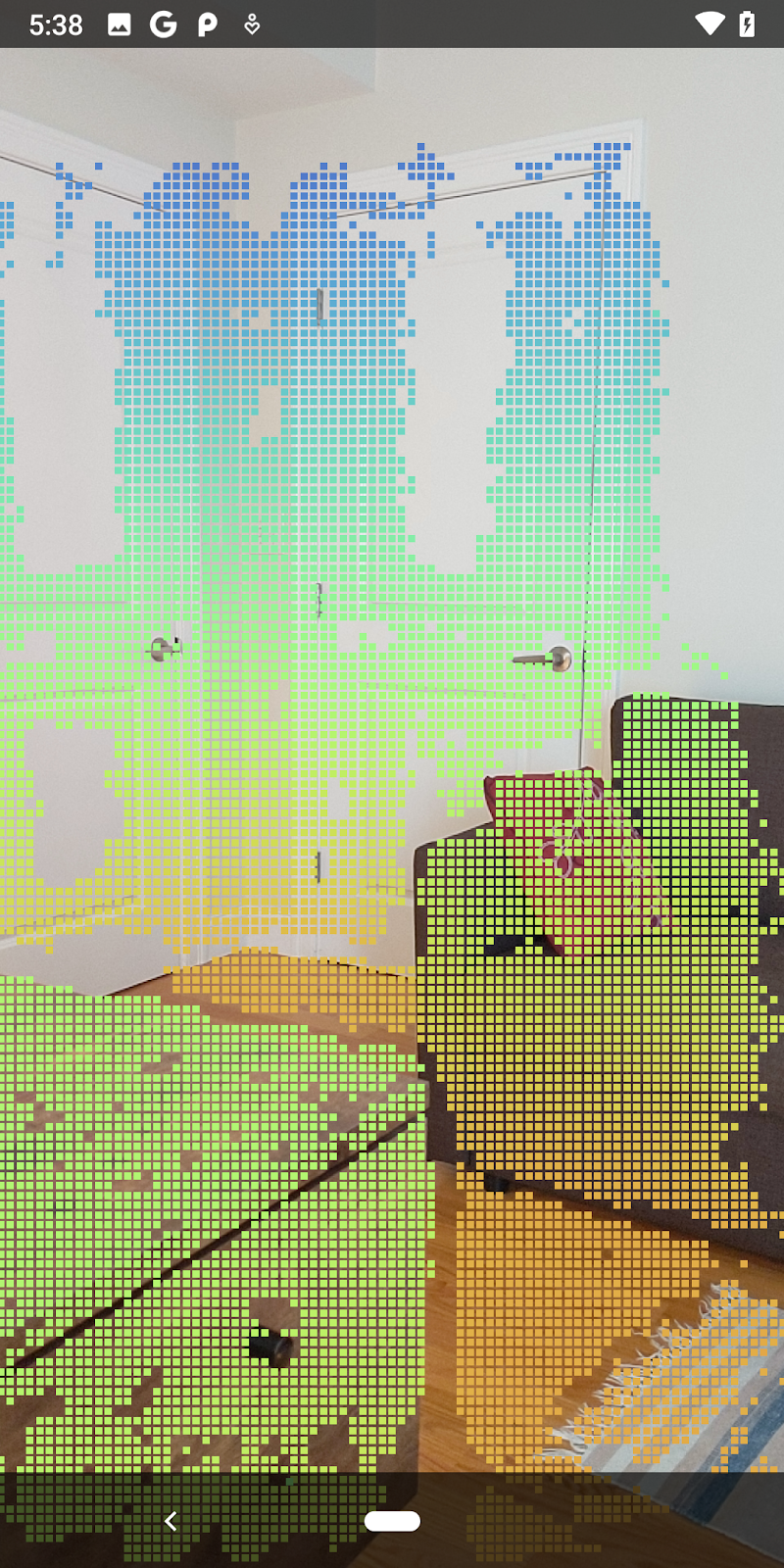
Désormais, seuls les points proches et à forte confiance s'affichent.
| Filtrage par distanceLimite le nuage de points à 1,5 mètre de la caméra. |
Comparer des points et des plans 3D
Vous pouvez comparer les points et les plans 3D de la géométrie et les utiliser pour les filtrer les uns par rapport aux autres, par exemple en supprimant les points proches des plans AR observés.
Cette étape ne laissera que les points "non planaires" qui ont tendance à représenter les surfaces des objets dans l'environnement. Ajoutez la méthode filterUsingPlanes() au bas de la classe DepthData. Cette méthode parcourt les points existants, vérifie chaque point par rapport à chaque plan et invalide tout point trop proche d'un plan de RA, en laissant des zones non planes qui mettent en évidence les objets de la scène.
src/main/java/com/google/ar/core/codelab/rawdepth/DepthData.java
public static void filterUsingPlanes(FloatBuffer points, Collection<Plane> allPlanes) {
float[] planeNormal = new float[3];
// Allocate the output buffer.
int numPoints = points.remaining() / DepthData.FLOATS_PER_POINT;
// Check each plane against each point.
for (Plane plane : allPlanes) {
if (plane.getTrackingState() != TrackingState.TRACKING || plane.getSubsumedBy() != null) {
continue;
}
// Compute the normal vector of the plane.
Pose planePose = plane.getCenterPose();
planePose.getTransformedAxis(1, 1.0f, planeNormal, 0);
// Filter points that are too close to the plane.
for (int index = 0; index < numPoints; ++index) {
// Retrieves the next point.
final float x = points.get(FLOATS_PER_POINT * index);
final float y = points.get(FLOATS_PER_POINT * index + 1);
final float z = points.get(FLOATS_PER_POINT * index + 2);
// Transform point to be in world coordinates, to match plane info.
float distance = (x - planePose.tx()) * planeNormal[0]
+ (y - planePose.ty()) * planeNormal[1]
+ (z - planePose.tz()) * planeNormal[2];
// Controls the size of objects detected.
// Smaller values mean smaller objects will be kept.
// Larger values will only allow detection of larger objects, but also helps reduce noise.
if (Math.abs(distance) > 0.03) {
continue; // Keep this point, since it's far enough away from the plane.
}
// Invalidate points that are too close to planar surfaces.
points.put(FLOATS_PER_POINT * index, 0);
points.put(FLOATS_PER_POINT * index + 1, 0);
points.put(FLOATS_PER_POINT * index + 2, 0);
points.put(FLOATS_PER_POINT * index + 3, 0);
}
}
}
Vous pouvez ajouter cette méthode à RawDepthCodelabActivity dans la méthode onDrawFrame :
// ********** New code to add ************
// Filter the depth data.
DepthData.filterUsingPlanes(points, session.getAllTrackables(Plane.class));
// ********** End new code to add *******
// Visualize depth points.
depthRenderer.update(points);
depthRenderer.draw(camera);
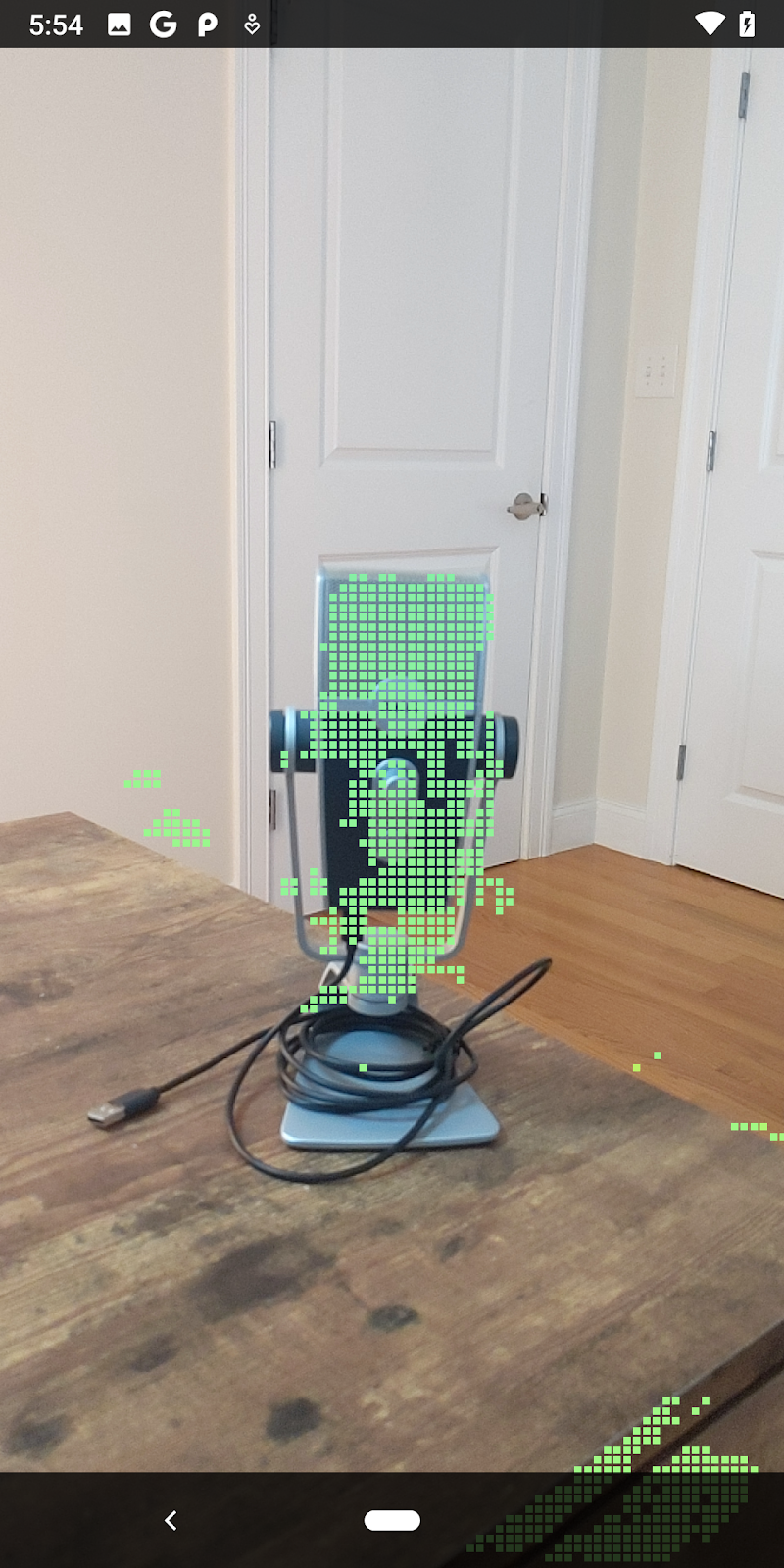
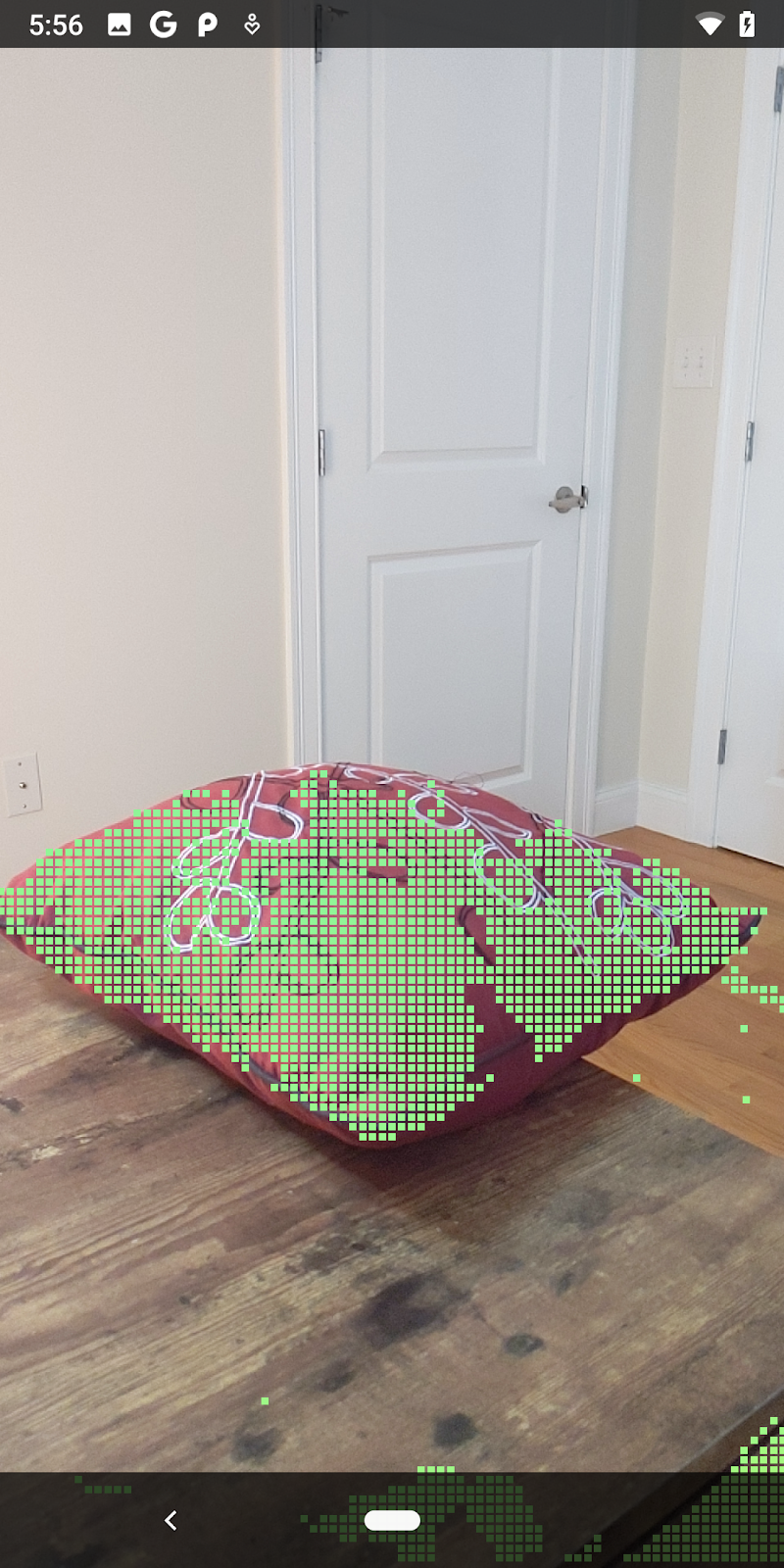
Si vous exécutez l'atelier de programmation maintenant, un sous-ensemble de points sera affiché. Ces points représentent les objets de la scène, tout en ignorant les surfaces planes sur lesquelles ils reposent. Vous pouvez utiliser ces données pour estimer la taille et la position des objets en regroupant les points.
|
|
|
|
Tasse de thé | Micro | Écouteurs | Pillow |


Points de cluster
Cet atelier de programmation contient un algorithme de clustering de nuages de points très simple. Mettez à jour l'atelier de programmation pour regrouper les nuages de points récupérés dans des clusters définis par des cadres de sélection alignés sur les axes.
src/main/java/com/google/ar/core/codelab/rawdepth/RawDepthCodelabActivity.java
import com.google.ar.core.codelab.common.helpers.AABB;
import com.google.ar.core.codelab.common.helpers.PointClusteringHelper;
import com.google.ar.core.codelab.common.rendering.BoxRenderer;
import java.util.List;
Ajoutez un BoxRenderer à cette classe en haut du fichier, avec les autres renderers.
private final BoxRenderer boxRenderer = new BoxRenderer();
Dans la méthode onSurfaceCreated(), ajoutez les éléments suivants à côté des autres renderers :
boxRenderer.createOnGlThread(/*context=*/this);
Enfin, ajoutez les lignes suivantes à onDrawFrame() à l'intérieur de RawDepthCodelabActivity pour regrouper les nuages de points récupérés dans des clusters et afficher les résultats sous forme de boîtes englobantes alignées sur les axes.
// Visualize depth points.
depthRenderer.update(points);
depthRenderer.draw(camera);
// ************ New code to add ***************
// Draw boxes around clusters of points.
PointClusteringHelper clusteringHelper = new PointClusteringHelper(points);
List<AABB> clusters = clusteringHelper.findClusters();
for (AABB aabb : clusters) {
boxRenderer.draw(aabb, camera);
}
// ************ End new code to add ***************
|
|
|
|
Tasse de thé | Micro | Écouteurs | Pillow |



Vous pouvez désormais récupérer la profondeur brute via une session ARCore, convertir les informations de profondeur en nuages de points 3D, et effectuer des opérations de filtrage et de rendu de base sur ces points.
8. Test de génération et d'exécution
Créez, exécutez et testez votre application.
Compiler et exécuter votre application
Procédez comme suit pour générer et exécuter votre application :
- Branchez un appareil compatible ARCore à l'aide d'un câble USB.
- Exécutez votre projet en cliquant sur le bouton ► dans la barre de menu.
- Attendez que l'application soit générée et se déploie sur votre appareil.
Au premier déploiement de l'application sur votre appareil, vous devez
Autoriser le débogage USB
sur l'appareil. Sélectionnez "OK" pour continuer.
Lorsque vous exécutez votre application pour la première fois sur votre appareil, il vous est demandé si elle est autorisée à utiliser l'appareil photo de celui-ci. Vous devez accorder cette autorisation pour continuer à utiliser la fonctionnalité de RA.
Tester votre application
Lorsque vous exécutez votre application, vous pouvez tester son comportement de base en manipulant votre appareil, en vous déplaçant dans l'espace où vous vous trouvez et en scannant lentement une zone. Essayez de collecter au moins 10 secondes de données et de scanner cette zone selon plusieurs axes avant de passer à l'étape suivante.
9. Félicitations
Félicitations, vous venez de créer et d'exécuter votre première application de réalité augmentée basée sur la profondeur brute grâce à l'API ARCore Raw Depth de Google. Nous avons hâte de découvrir vos créations !
10. Dépannage
Configurer votre appareil Android pour le développement
- Connectez votre appareil à l'ordinateur de développement à l'aide d'un câble USB. Si vous développez avec Windows, vous devrez peut-être installer le pilote USB correspondant à votre appareil.
- Pour activer le débogage USB dans la fenêtre Options pour les développeurs, procédez comme suit :
- Ouvrez l'application Paramètres.
- Si votre appareil est équipé d'Android 8.0 ou version ultérieure, sélectionnez Système.
- Faites défiler l'écran jusqu'en bas, puis sélectionnez À propos du téléphone.
- Faites défiler l'écran jusqu'en bas, puis appuyez sept fois sur Numéro de build.
- Revenez à l'écran précédent, faites défiler la page jusqu'en bas, puis appuyez sur Options pour les développeurs.
- Dans la fenêtre Options pour les développeurs, faites défiler l'écran vers le bas pour trouver et activer l'option Débogage USB.
Pour en savoir plus sur cette procédure, consultez le site Web des développeurs Android de Google.
Échecs de génération dus à des licences
Si vous rencontrez un problème de génération lié à des licences (Failed to install the following Android SDK packages as some licences have not been accepted), vous pouvez utiliser les commandes suivantes pour vérifier et accepter ces licences :
cd <path to Android SDK>
tools/bin/sdkmanager --licenses